The emerging ADAS and Autonomy Driving applications are driving new functionality requirements in automotive radar technology. To support new applications, radars have to evolve beyond a standard FMCW automotive radar to offer new, innovative capabilities such as ultra-high resolution imaging.
While standard radar has proven to be a reliable and robust solution for basic ADAS capabilities such as adaptive cruise control, emergency braking, and collision avoidance, it is far from perfect. Standard radar is missing several key capabilities that enable advanced autonomy applications such as highway entrances and exits, lane changes and merges, traffic jam assist, non-drivable tire debris avoidance, improved automatic emergency braking, and support for autonomous levels 3 and 4. In addition, standard radars suffer from high false alarm rate and poor performance detecting stationary objects.
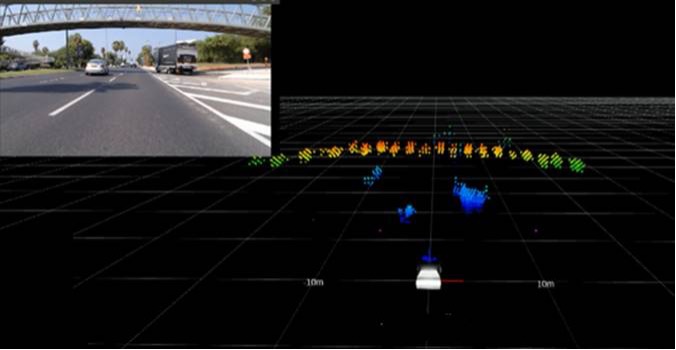
Let’s look at the basic parameter that sets the image quality: A radar display is composed of numerous dots, and each dot in the radar display represents the radar backscatter from a specific location in space. Similar to camera resolution, the higher the radar resolution, the better its raw imaging capability. For road safety, quality images of cars, motorcycles, bikes, pedestrians, animals, and even tire debris are needed.
The main requirement from an AV radar is to evolve from being a sensor capable of detecting that there is something ahead, to being a sensor that can detect multiple objects, separate them, classify them as one of the variable objects on the road, localize them, and contain them in a bounding box.
Ultra-high-resolution radar provides detailed information about detected objects. In addition to accurate DOA (direction of arrival), it can also provide object orientation and object boundaries. The current generation of automotive radar is called “imaging radar” due to an improvement in its spatial resolution from 10-20deg to 3-5deg, but in practice, it does not have the resolution needed to support object separation and classification and meet the requirements of AV applications.
Resolution plays a role in all four dimensions of radar data – Range, Velocity, Azimuth, and Elevation. High range and velocity resolution are well-defined and based primarily on high bandwidth and long CPI (coherent processing interval), but obtaining high azimuth and elevation resolution is a much greater challenge.
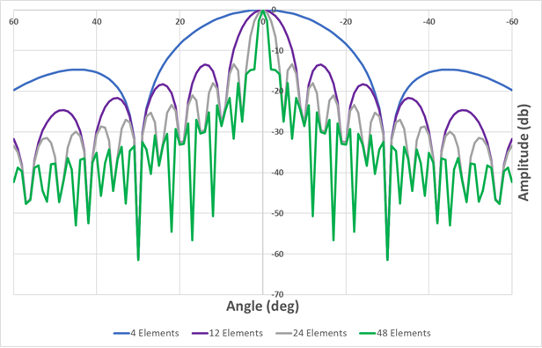
The building blocks of high azimuth and elevation angular resolution are based on scaling the antenna size and increasing the channel count to cover the relevant antenna area with channels. The limited channel offering of current generation radar chipsets creates an inherent tradeoff between the antenna size and an optimal spread of channels.
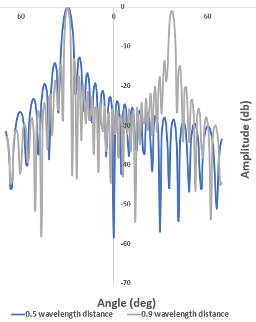
On one hand, scaling the antenna with a large spread between channels may result in theoretically higher angular resolution but it will suffer from high grating lobes (see figure 2 below), limited field of view, and a high level of false alarms. On the other hand, using an optimal spread of lambda/2 (lambda/2 equals 1.95mm in 77GHz) between the channels will dictate smaller antenna and lower resolution, as the number of available channels in existing radars is limited (most common solutions are 4Rx channels, some can scale with cascading to 16Rx channels).
As described above, the physical resolution is limited by the current generation of radar chipsets, and vendors are driven to implement algorithms to improve the physical resolution of the radar. While the algorithms may offer some performance improvements in specific scenarios and under specific assumptions, they have major performance challenges and fail to perform in cases of reflective objects, a high number of orthogonal targets, targets with an identical Doppler in the same range, etc.
The challenge created by using more channels and higher resolution is that the volume of data goes up dramatically, resulting in the need for more processing power—a dedicated, cost-effective, optimal processor that can deal with and process a high amount of data is required (the needed theoretical processing power is greater than 1.5Tbps). A chipset solution that includes numerous Tx and Rx channels plus a dedicated processor is key to achieving a cost-effective, compact, low power consumption, ultra-high resolution automotive imaging radar.
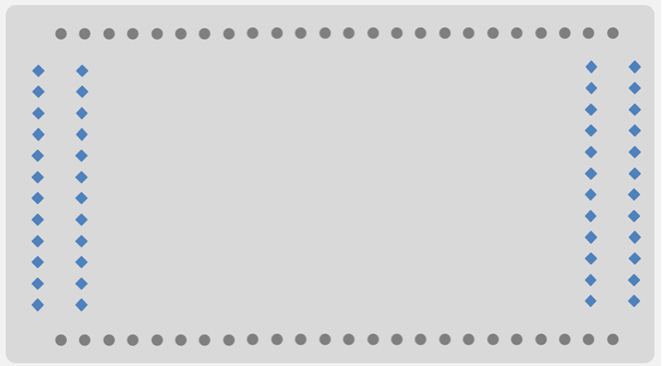
In summary, not all radars are created equal—some are based on a low channel count that limits their capabilities. Next-generation automotive radar is required for high imaging capabilities, and the basic building block to achieve imaging capabilities lies in the physical resolution of the radar. A radar chipset with 48 Tx and 48 Rx channels accompanied by a dedicated processor enables optimal size and spread of the antenna in order to get the needed resolution without ambiguities or false alarms.
Arbe’s high-resolution imaging radar chipset solution offers superior channel counts that result in improved spatial separation, enabling ultra-high imaging capabilities in all dimensions with high reliability, regardless of lighting or weather conditions. Combined with Arbe’s high Doppler resolution, the radar can distinguish efficiently between stationary and dynamic objects.
Connect to learn more








